Ginocchio Elettronico
È il più sofisticato ginocchio protesico attualmente in produzione al mondo e si può senz’altro affermare che rappresenta la nuova dimensione del passo.
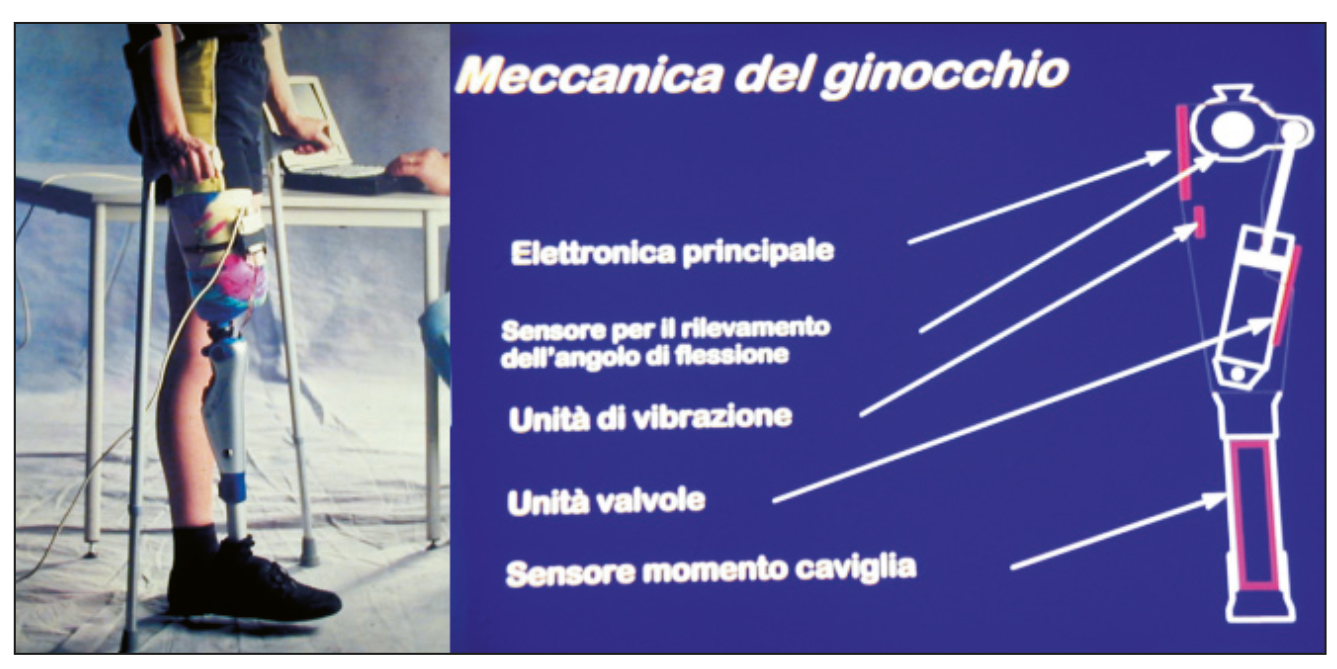
Si tratta di un ginocchio monocentrico idraulico a con trollo elettronico, completamente assistito da micropro cessore. Grazie a dei sensori posti a vari livelli, affluiscono al microprocessore dei dati che, elaborati, determinano il controllo dell’unità idraulica, Il microprocessore controlla il passo sia in fase statica (quindi sotto carico) che in fase dinamica.
I sensori rilevano il valore dì alcuni parametri fondamentali:
1. Velocità.
2. Angolo di flessione del ginocchio.
3. Forze di appoggio al tallone ed alla pianta e le varie fasi del passo.
Il microprocessore percepisce le condizioni di quell’istante e quindi valuta quando sia necessario frenare o bloccare e quando invece sia necessario accelerare per assecondare la velocità del passo. Grazie a questi sistemi di controllo, il camminare ritorna ad essere un processo automatico che non richiede una continua attenzione e concentrazione da parte dell’amputato come avviene in tutti gli altri ginocchi.
La registrazione individuale, in base alle reali esigenze della persona, avviene per mezzo di un software che gira sotto MS Windows. Durante un ciclo completo della deambulazione (tempo medio ca. 1,2 sec.), il C-LEG esegue ed elabora circa 60 misurazioni adattandosi automaticamente a tutte le situazioni. Un accumulatore al litio-ionio ha una capacità di 25-30 ore; una seconda batteria esterna serve in caso di emergenza e ha 10 ore di capacità. Il peso totale del ginocchio è di soli 1100 g. 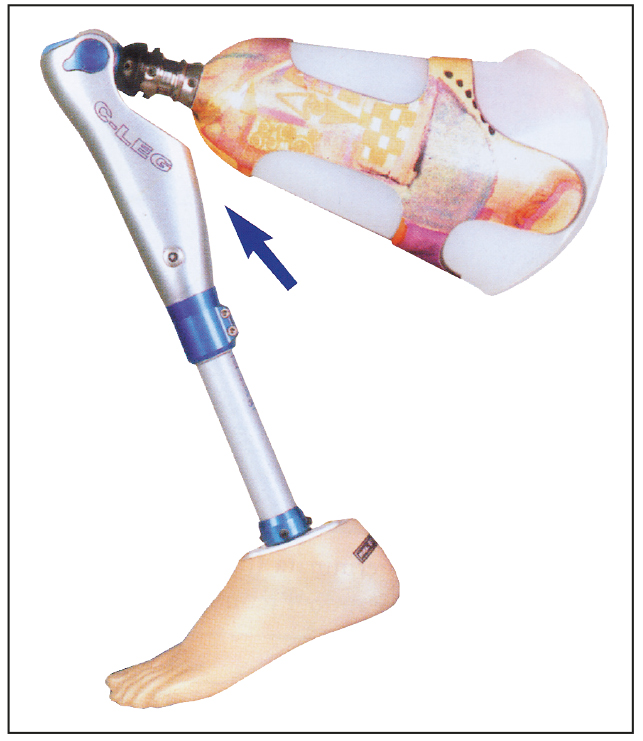
Il ginocchio modulare C-LEG si serve di microprocessori che controllano un dispositivo idraulico per adattare la velocità di deambulazione ed avere un movimento più fluido dell’articolazione. Ciò permette di poter camminare velocemente (fino a 10 Km/h) o lentamente semplicemente e con sicurezza. L’ammortizzazione idraulica della fase statica rende il ginocchio sicuro momento del contatto del tallone con il suolo.
Questa viene disattivata al momento del carico sull’avampiede per consentire l’introduzione della fase dinamica con il minor dispendio di energie. In questo modo l’arto controlaterale non viene inutilmente sovraccaricato, il ciclo del passo si avvicina a quello fisiologico, le possibilità di cadere vengono ridotte al minimo. Ciò permette inoltre di camminare senza problemi nelle più diverse condizioni di impiego: cammino in piano, cammino su terreno accidentato, cammino in salita e discesa, discesa di una rampa delle scale alternando piede destro e piede sinistro.
- Ortesi

- Ausili

- Protesi

- Servizi
- NOLEGGIO
- Carrozzina pieghevole ruote grandi (nolo)
- Carrozzina pieghevole ruote piccole (nolo)
- Deambulatore ascellari (nolo)
- Noleggio deambulatore (nolo)
- Letto elettrico (nolo)
- Sollevatore Elettrico (nolo)
- Montascale a cingoli (nolo)
- Letto ortopedico una manovella (nolo)
- Magnetoterapia (nolo)
- Sponde per letto elettrico (nolo)
- NOLEGGIO
- Offerte
- Blog
- Convegni